二粒子系の波動方程式
二粒子系の波動方程式は次のように考えることで、粒子1個の問題として取り扱うことができるようになり、簡単になる。
質量がと
の2個の粒子が、それぞれ速度
と
をもっている。そして、位置エネルギー
で運動しているとする。
この時のエネルギーは次の式で求めることができる。
各粒子( )の座標を(
)とする。このとき重心の座標(
)は次の式のように表すことができる。
各粒子の速度を表すベクトル[texV_i]は、各座標成分の時間微分となる。つまり次の式のようになる。
重心の速度をとする。重心の速度は各座標成分を時間で微分して求めることができるため、次のように表すことができる。
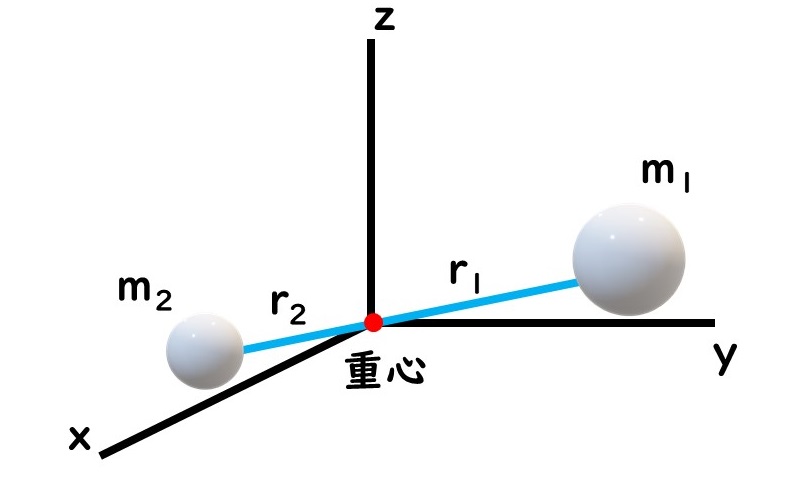
ここで、粒子に着目して座標を考える。1つ目の粒子の座標を基準にして、2つ目の粒子の座標を考えると、相対座標()を次のように表すことができる。
相対速度は、相対座標の時間変化であるため、2つの粒子を考えることで、次のように表すことができる。
重心の運動は粒子間の相対運動とは独立している。そして、粒子同士の相対的な位置を保ったまま、粒子が並んで運動することから、並進運動という。
二粒子系のエネルギーを相対運動と並進運動の速度を用いて表すと次のようになる。
上の式の最初の項は並進運動(重心運動)の運動エネルギーを表す。第2項は相対運動の運動エネルギーを表す。第2項のは2個の各粒子の質量の逆数の和の逆数であり換算質量といわれる。換算質量は次のように表すことができる。
質量と
の2個の球が距離
で結合している。
この時、重心を座標の原点に固定することによって、二粒子系のエネルギーの第1項が0となって消えるため、第2項ののみが運動エネルギーとして残る。そのため、2個の相対運動は換算質量
をもつ1個の粒子の運動として取り扱うことができる。
その結果、以下のように1粒子の波動方程式と同じ形で表すことができる。
こういった場合、原点からの距離が重要となる。そのため、直行座標(
)の代わりに三次元の極座標(
) を変数にとる。
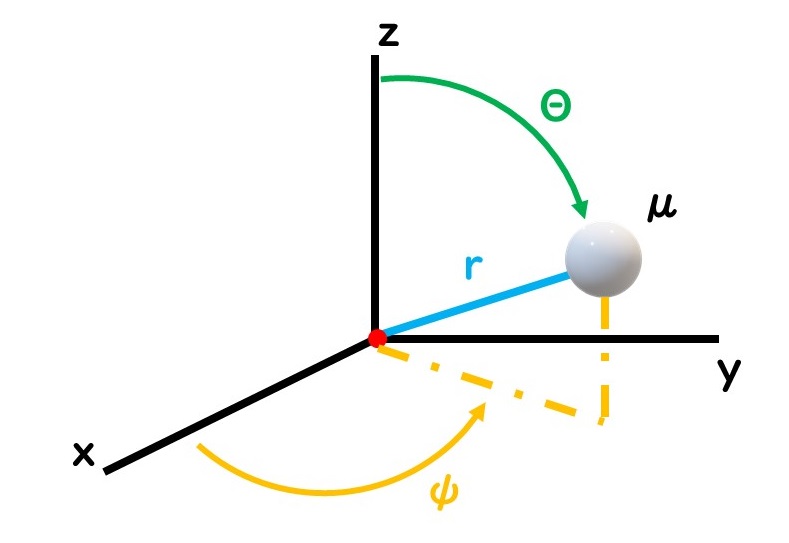
この極座標は、原点からの距離、
軸からのずれの角度
、
面に投影した点が
軸からどれだけずれているかを表す角度
を用いている。
極座標を用いた場合、体積要素は次のように表すことができる。
ラプラシアンは次のように表すことができる。
ここではルジャンドリアンといわれ、二つの角度
と
に依存する演算子であり、次の式のように求めることができる。
ラプラシアンやルジャンドリアンの式の右辺の演算子は、演算を行う関数に対して、各項の右端部分から順番に演算を行う。